<
Serge77 - Моя ракетная мастерская >МАГНИТНЫЙ ДАТЧИК АПОГЕЯ
Простой и надёжный датчик апогея, который может гарантировать выброс парашюта в наивысшей точке траектории полёта ракеты - это ли не мечта каждого ракетчика? На сегодняшний день датчики, основанные на определении ориентации ракеты относительно силовых линий магнитного поля Земли, можно считать наиболее близкими к такому идеалу.
Магнитные датчики апогея начали использоваться ракетомоделистами с 1999г и сразу зарекомендовали себя как очень надёжные:
Свой датчик я собрал по схеме, аналогичной описанной во второй и третьей ссылке, однако вместо труднодоступных в наших краях и относительно дорогих ($17) магниторезистивных датчиков Honeywell HMC1001 и Philips KMZ51 я использовал Philips KMZ10A1. Информацию о датчиках Philips можно найти
здесь. Других вариантов замены я не знаю.Полный перечень деталей:
KMZ10A1 - магниторезистивный датчик, $2.44 (
документация 85 КВ)Duracell Alkaline 9V - батарея, $2.41 (
документация 341 КВ). Важно использовать именно эту батарею, потому что она может обеспечить ток в 1-2А, необходимый для воспламенителя. Можно использовать аккумулятор.В Киеве весь набор можно купить в
VD-MAIS.Обсуждение разработки датчика можно найти на форуме
здесь, здесь и здесь.Схема датчика в “минимальном варианте” выглядит так (схема 1):
СХЕМА 1
Использование датчика имеет одну особенность, которую легко наблюдать, если заменить воспламенитель на лампочку (она должна быть расчитана на 9-12 V). Иногда в момент включения питания (Sw1) лампочка коротко мигает и гаснет. А совсем редко даже включается и не гаснет. Это в вертикальном положении
датчика, т.е. лампочка не должна ни мигать, ни загораться. Таким образом, датчик может иногда самопроизвольно срабатывать в момент включения. Об этом же пишет и автор схемы во второй ссылке.Для того, чтобы уменьшить вероятность самопроизвольного срабатывания, на схему можно добавить конденсаторы С1 (0.1 мкФ) и С2 (0.33 мкФ) (схема 2)
:
СХЕМА 2
Я пробовал установить такие конденсаторы, но каких-нибудь положительных изменений не заметил. Поэтому для контроля на схеме добавлена лампочка и переключатель Sw2. Включать схему необходимо при отключенном воспламенителе (Sw2), а затем, если контрольная лампочка не горит, подключать воспламенитель (замыкать Sw2).
Часть схемы, расположенная слева от красных рисок, монтируется на печатной плате и закрепляется в ракете на расстоянии минимум 20 см от небольших железных и других ферромагнитных предметов (батарея, переключатели, крепёжные винты и т.д.) и минимум на 40 см от крупных (стальной двигатель, другие детали). Можно устанавливать и ближе, но тогда это нужно учесть при калибровке, как описано дальше.
Уточню: на датчик влияют не все металлы, а только те, которые притягиваются магнитом. Особенно сильно датчик реагирует на предметы, создающие магнитное поле: магниты, намагниченные железки (часто это может быть отвёртка), электромагниты, реле, электродвигатели и т.д.
Для того, чтобы устройство срабатывало при необходимом угле наклона, нужно подобрать величину калибровочного сопротивления R1. Его нужно подбирать индивидуально для каждого устройства, для этого временно вместо R1 нужно впаять переменный резистор на 1-2 МОм
, затем, изменяя его сопротивление, подобрать нужный угол срабатывания, выпаять переменный резистор, замерить его сопротивление и впаять на схему постоянный резистор ближайшего номинала. После этого нужно снова проверить угол срабатывания.Схема, готовая к калибровке:
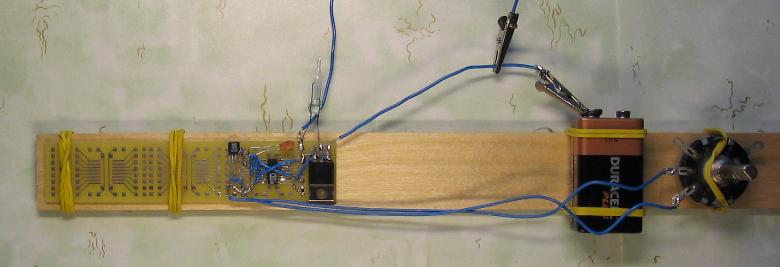
Устройство изготовлено по Схеме 1, только вместо воспламенителя на время калибровки установлена лампочкана 12 В. Оранжевый конденсатор в верхней части фото – это “остаток” от проверки влияния конденсаторов на работу датчика, впоследствии я его убрал.
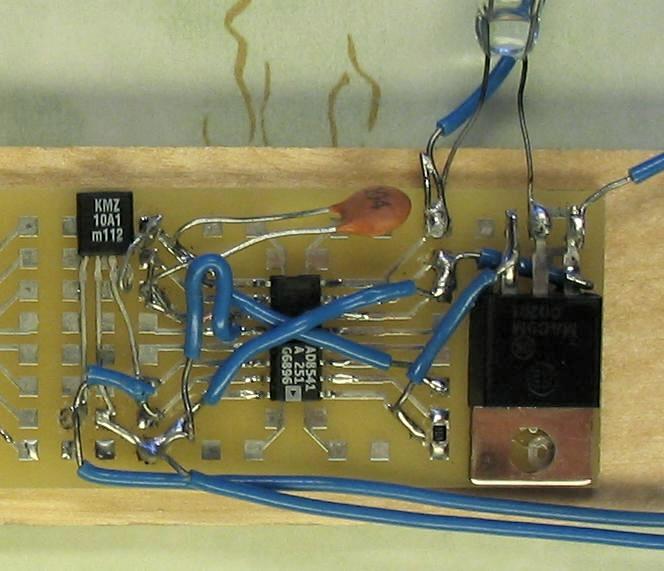
Устройство спаяно на макетной плате под SMD, индекс CRS-028 (в Киеве есть на Караваевых дачах, павильон 9В). "Верх" находится слева, т.е. в ракете левая сторона должна быть направлена вверх. В центре платы - две микросхемы: сверху стабилизатор питания, снизу усилитель. Справа тиристор, он приклеен к плате, его выводы сильно укорочены. Вместо R1 впаян переменный резистор. Все железосодержащие детали отнесены от магниторезистивного датчика минимум на 20 см, чтобы они не влияли на его работу.
Для калибровки необходимо изменять сопротивление R1 до тех пор, пока датчик будет срабатывать при переворачивании из вертикального положения на необходимый угол. Нужно помнить, что при наклоне в сторону севера срабатывание наступает раньше, чем при наклоне в сторону юга. Например, если при наклоне в сторону севера датчик срабатывает примерно на 20 градусах от вертикали, то при наклоне на юг – на 70 градусах. Это на широте Киева, в более северных районах эта разница будет меньше, а в более южных – больше. Вблизи экватора такой датчик бесполезен ;^))
Датчик, показанный на фото, был испытан на ракетах
X-6A-1 и Полюс. Угол срабатывания был настроен на 90 градусов от вертикали при наклоне на восток или запад. В полёте датчик срабатывал сразу после апогея.Если датчик калибруется в комнате, где вокруг много железных предметов (например
, дом из железобетонных панелей), то угол срабатывания в полевых условиях может оказаться немного другой. Калибровка может сбиться и по какой-то другой причине, поэтому перед стартом ракеты обязательно необходимо проверить работу датчика.Не во всех случаях близость железных предметов делает датчик неработоспособным. Например, на ракетах
X-6A-1 и Полюс батарея с железным корпусом установлена вблизи датчика, однако оказалось достаточно только перекалибровать резистор R1 и всё заработало. Таким образом, если в ракете датчик будет установлен вблизи железных предметов, то калибровку необходимо проводить с датчиком, установленным в ракету, и после этого не изменять относительное расположение датчика и железок, это взаимное расположение не должно изменяться и в полёте). В любом случае перед стартом ракеты обязательно необходимо проверить работу датчика.
Магниторезистивный датчик смонтирован возле самого края платы для того, чтобы его можно было закрепить вплотную к корпусу ракеты. Если произойдёт сбой настройки датчика (здесь имеется в виду не описанная выше калибровка схемы, а состояние самого чипа
KMZ), необходимо будет поднести к корпусу ракеты небольшой магнит. Подносить магнит нужно по направлению стрелки, убирать в обратном направлении. Каким именно полюсом нужно подносить – нужно выяснить экспериментально. Сбой состояния чипа может произойти, если вблизи датчика окажутся намагниченные предметы.
06.12.2003 – 04.02.2005 Serge77